К вопросу применения экзоскелетов в промышленной и строительной сфере - история разработок, виды, классификация
Верейкин А.А., Московский государственный технический университет им. Н.Э. Баумана, кафедра "Гидромеханика, гидромашины и гидропневмоавтоматика"
УДК 621.865.8
Используемые сокращения: ДВС - Двигатель Внутреннего Сгорания; ИМ - Исполнительный Механизм; ШР - Шагающие Роботы; ЭС - ЭкзоСкелет.
Экзоскелет (от греческого: εξω - внешний и σκελετος - скелет) - техническое устройство, предназначенное для снятия с человека-оператора внешних статических и динамических нагрузок и увеличения его мышечных усилий. ЭС представляет собой внешний каркас в виде многозвенного исполнительного механизма, образующего параллельные взаимосвязи с оператором.
Восприятие внешних нагрузок обеспечивается за счёт использования в исполнительном механизме (ИМ) экзоскелета силовых приводов различного вида. Силовые приводы управляются сигналами с системы датчиков, получающих информацию от оператора и исполнительного механизма. Для обеспечения выполнения различных движений оператора экзоскелет должен повторять биомеханику человека.
Экзоскелет принадлежит к классу шагающих роботов (ШР), характеризующихся древовидной кинематической структурой. К числу наиболее существенных преимуществ ШР относится возможность их перемещения по сильно пересечённой местности и сопутствующее этому сравнительно низкое энергопотребление. Рычажно-шарнирные системы при перемещении не оставляют за собой сплошной колеи, как это происходит с колёсными и гусеничными машинами, что положительно влияет на энергоэффективность этого способа перемещения. С другой стороны, при движении по относительно ровной поверхности колёсные и гусеничные машины имеют неоспоримые преимущества по критерию энергопотребления, так как, в отличие от ШР, способны двигаться по инерции. Из этого следует, что применение экзоскелета наиболее целесообразно в условиях сильно пересечённой местности, а также в условиях, специально созданных для человека (кабины различной техники, здания, реабилитация, абилитация и т.п.). Более подробно возможные области и типовые сценарии применения экзоскелета будут рассмотрены ниже.


Рис. 1, 2. Экзоскелет Hardiman, USA, General Electric, 1965 г.
Пионерами в области разработки экзоскелетов принято считать американскую фирму General Electric, создавшую в 1965 г. экзоскелет Hardiman (рис. 1, 2) и сербского учёного Миомира Вукобратовича (институт М. Пупина, Белград, Югославия), представившего в 1969 г. экзоскелет, оснащённый пневматическими силовыми приводами [1] (рис. 3), способный воспроизводить походку, близкую к антропоморфной.
Рис. 3. Экзоскелет М. Вукобратовича, воспроизводящий походку, близкую к антропоморфной, Институт М. Пупина в Белграде, Югославия, 1969 г.
Hardiman обладал грузоподъёмностью 110 кг и собственной массой в 650 кг, проект не получил дальнейшего развития, главным образом, в силу несовершенства системы управления: были возможны неконтролируемые перемещения частей ИМ, которые могли привести к тяжёлым травмам человека-оператора.
Проект М. Вукобратовича был более успешен: он стал предтечей не только ряда экзоскелетов медицинского назначения, но и современных антропоморфных ШР как класса. На рис. 4 представлена первая версия "силовой ноги", разработанная в 1971 г. Экзоскелет медицинского назначения с программно реализованной походкой, близкой к антропоморфной, был представлен в 1972 г. (рис. 5, 6), в настоящее время один экземпляр, переданный в рамках советско-югославского научного сотрудничества в Центральный институт травматологии и ортопедии (г. Москва), экспонируется в Политехническом музее г. Москвы (рис. 7, 8) [1, 2].

Рис. 4. "Силовая нога", разработанная М. Вукобратовичем, Институт М. Пупина в Белграде, Югославия, 1971 г.
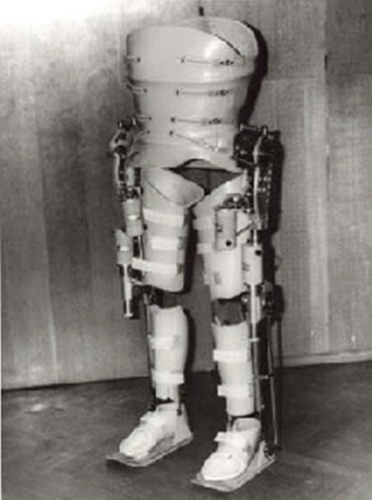

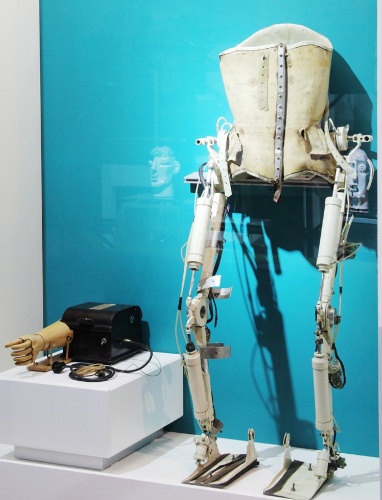

Рис. 5, 6. Экзоскелеты М. Вукобратовича медицинского назначения, Югославия, 1972 г. Рис. 7, 8 - Политехнический музей, Москва.
Венцом творений М. Вукобратовича явилась так называемая "активная экипировка" (рис. 9) для людей, страдающих дистрофией, созданная в 1978 г. в сотрудничестве с американскими организациями SRS (Social & Rehabilitation Services) и NSF (National Science Foundation) в рамках научного сотрудничества Югославии и США. ИМ приводился в движение посредством системы электромеханических приводов, управляемых микрокомпьютером.

Рис. 9. "Активная экипировка" для ношения людьми, страдающими дистрофией. Разработана под руководством М. Вукобратовича, 1978 г.
Классификация экзоскелетов
Многообразие различных конструкций и исполнений экзоскелетов, созданных на сегодняшний день и разрабатываемых на перспективу, обуславливает необходимость введения их классификации, построенной на основании наиболее характерных признаков. Приведён один из возможных вариантов классификации, определены основные достоинства и недостатки, присущие различным типам экзоскелетов в соответствующем классе.
Классифицирующие признаки экзоскелетов:
1. Тип исполнительного механизма (ИМ).
A. Экзоскелеты рамного типа. ИМ экзоскелетов рамного типа представляют собой стержневую конструкцию, имеющую минимальное количество связей с телом человека-оператора. Характерным примером рамных экзоскелетов могут служить проект Hardiman (рис. 1, 2) и экзоскелеты М. Вукобратовича (рис. 3-9).
Достоинства:
- Простота конструкции.
- Сниженное энергопотребление.
- Возможность экстренного отделения ИМ от человека.
Недостатки:
- Низкий уровень эргономичности.
- Повышенная сложность системы управления вследствие того, что отдельному движению оператора практически всегда соответствует некоторая совокупность движений звеньев ИМ экзоскелета.
- При сопоставимом с экзоскелетом капсульного типа количестве степеней подвижности обеспечивается реализация меньшего количества движений оператора.
- Оператор практически не защищён от нежелательных внешних воздействий.
- Низкая жёсткость конструкции.
B. Экзоскелеты капсульного типа. ИМ ЭС капсульного типа построены как некий доспех (капсула), закрывающий тело оператора. Более подробно концепция экзоскелета капсульного типа представлена в работе [3]. На сегодняшний день отсутствуют реализованные проекты капсульных экзоскелетов. В качестве примера экзоскелета такого типа можно привести концепт, разработанный в 2007 г. канадским изобретателем T.J. Hurtubise (рис. 10) [4].

Рис. 10. Концепт экзоскелета нижних и верхних конечностей капсульного типа, Trojan, T.J. Hurtubise, Канада, 2007 г.
Достоинства:
- Лучше повторяют биомеханику человека, реализовывая в ряде случаев принцип "одно движение оператора - одно движение ИМ" за счёт применения цилиндрических шарниров с виртуальной осью поворота.
- Обладают несколько более простой системой управления за счёт реализации принципа "одно движение оператора - одно движение ИМ".
- Обеспечивают более простое освоение оператором процессов управления ИМ.
- Позволяют интегрировать в конструкцию экзоскелета бронезащиту при минимальных изменениях конструкции.
- Высокая жёсткость конструкции.
Недостатки:
- Увеличение количества степеней подвижности ИМ.
- Высокая сложность конструкции сочленений.
- Повышенное энергопотребление.
- Невозможность экстренного отделения ИМ от человека.
Очевидно, что наибольшими перспективами обладают экзоскелеты капсульного типа, однако их развитие сдерживается высоким уровнем сложности конструкции ИМ (главным образом, сочленений). Поэтому на сегодняшний день существует множество действующих образцов ЭС рамного типа и ни одного - капсульного типа.
2. Наличие приводов усиления сочленений.
По критерию применения усиления сочленений можно выделить экзоскелеты следующих классов:
A. Пассивные. Сочленения экзоскелета не усилены, силовые приводы отсутствуют. В качестве примеров пассивных экзоскелетов можно привести Robo-Mate (рис. 11), Ekso Works и Fortis.

Рис. 11. Пассивный экзоскелет верхних конечностей Robo-Mate, Европейский союз, 2015 г.
Достоинства:
- Максимально упрощённая конструкция.
- Минимальные габариты и масса.
Недостатки:
- Позволяют разгрузить оператора только в некоторых фиксированных положениях его тела, что делает возможным практическое использование экзоскелетов такого типа только в медицине.
- Нулевая грузоподъёмность.
B. Активные. Все сочленения экзоскелета усилены за счёт силовых приводов. Характерный представитель этого вида - XOS 2 (рис. 12).

Рис. 12. Неавтономный экзоскелет нижних и верхних конечностей XOS 2, Sarcos-Raytheon Company, США, 2010 г.
Достоинства:
- Возможность усиления множества движений оператора.
- Практически неограниченные возможности применения.
- Грузоподъёмность определяется исключительно ИМ.
Недостатки:
- Максимальная сложность конструкции.
- Высокое энергопотребление.
C. Комбинированные. Часть сочленений ИМ экзоскелета усилена приводами, часть же остаётся пассивными. В числе комбинированных экзоскелетов можно упомянуть BLEEX (рис. 13).

Рис.13. Автономный экзоскелет нижних конечностей BLEEX, Berkeley Robotics & Human Engineering Laboratory, США, 2004 г.
Достоинства:
- Более простая, чем у активных ЭС, но более сложная в сравнении с пассивными ЭС конструкция.
- Сниженное в сравнении с активными экзоскелетами энергопотребление.
- Возможность оптимизации конструкции за счёт оставления пассивными ряда второстепенных сочленений.
Недостатки:
- На грузоподъёмность влияют физиологические характеристики человека.
Практическое применение пассивных экзоскелетов сильно ограничено. Активные ЭС, с учётом актуального уровня техники и технологии, могут быть реализованы только в случае сильно заниженного количества степеней подвижности ИМ, что, в свою очередь, ограничивает возможность повторения движений оператора до неприемлемого уровня. Таким образом, наиболее перспективным направлением развития видится создание экзоскелетов комбинированного типа, в которых усилены только наиболее важные сочленения, в то время как второстепенные оставлены пассивными. Это приводит, с одной стороны, к существенному упрощению конструкции, а с другой, - к тому, что пассивные сочленения управляются оператором за счёт собственных мышечных усилий.
3. Анатомическая локализация усиленных сочленений.
По анатомическому расположению усиленных сочленений на теле оператора можно выделить ЭС следующих классов:
A. Экзоскелеты нижних конечностей. Усилены только сочленения нижних конечностей. Примеры: экзоскелеты BLEEX (рис.13) и ExoAtlet (рис.14)

Рис.14. Автономный ЭС нижних конечностей ExoAtlet, НИИ Механики МГУ и Экзороботикс, Россия, 2015 г.
Достоинства:
- Облегченная и упрощённая конструкция.
Недостатки:
- Ограниченная функциональность: может использоваться для облегчения марш-бросков с попутным переносом груза, закреплённого на спине ИМ.
B. Экзоскелеты верхних конечностей. Усилены только сочленения верхних конечностей. Пример - ЭС Robo-Mate (рис. 11).
Достоинства:
- Облегченная и упрощённая конструкция.
Недостатки:
- Вся нагрузка воспринимается нижними конечностями оператора, что сильно ограничивает грузоподъёмность и, по сути, предопределяет медицинское назначение экзоскелета в качестве реабилитационного или абилитационного.
C. Экзоскелеты нижних и верхних конечностей. Примеры ЭС данного типа: XOS 2 (рис. 12), HAL (рис. 15)

Рис. 15. Автономный экзоскелет нижних и верхних конечностей HAL, Cyberdyne Corporation, Япония, 2012 г.
Достоинства:
- Широкая функциональность.
- Высокая грузоподъёмность.
Недостатки:
- Технически сложная конструкция с большим количеством степеней подвижности.
- Повышенное энергопотребление.
- Большая масса.
- Максимально ограниченная подвижность оператора.
D. Экзоскелеты отдельных частей тела. Могут быть как активными (роботизированные экзопротезы), так и пассивными (ортезы). Представителями этого класса являются: экзоскелет спины AWN-02 (рис. 16), роботизированный экзопротез нижних конечностей BiOM Ankle (рис. 17), разработанный компанией BiONX (США) под руководством профессора MIT Hugh Herr [5-7], и рамный коленный ортез Genu Arexa производства германской компании Otto Bock (рис. 18) [8]. Как отмечается в [7], экзопротез BiOM Ankle может быть использован для уровней ампутации как ниже, так и выше колена.

Рис. 16. Автономный экзоскелет спины, AWN-02, ActiveLink (Panasonic), Япония, 2015 г.

Рис. 17. Роботизированные экзопротезы голеностопного сочленения, BiOM Ankle, BiONX, США, 2014 г.

Рис. 18. Коленный ортез рамного типа, Genu Arexa, Otto Bock, Германия, 2014 г.
Достоинства:
- Минимальные масса и габариты.
- Наибольшая простота конструкции.
- Возможность использования в качестве источника энергии аккумуляторных батарей.
Недостатки:
- Ограниченная функциональность: экзоскелеты такого типа характерны для медицинской области применения.
Считается, что реализация процесса антропоморфной ходьбы является одной из ключевых проблем создания экзоскелетов, поэтому большая часть разработчиков занимается созданием ЭС нижних конечностей, к которым в перспективе могут быть добавлены верхние конечности.
Наиболее широким диапазоном выполняемых функций обладают экзоскелеты нижних и верхних конечностей, что делает их в перспективе наиболее совершенными. Однако в настоящее время не решены проблемы соответствия ИМ экзоскелета биомеханике человека и энергообеспечения системы силовых приводов, что сильно ограничивает возможности практического применения ЭС такого типа.
Достаточно широкое распространение получили экзоскелеты отдельных частей тела, что обеспечивается их сравнительной простотой и возможностью обеспечения приемлемого уровня автономности.
4. Наличие бортового источника энергии.
По критерию наличия бортового источника энергии экзоскелеты разделяются на два класса:
A. Автономные. За счёт наличия бортового источника энергии обеспечивается автономное функционирование ИМ. Одним из наиболее характерных примеров является ЭС BLEEX (рис. 13) или концептуальная разработка компании Rhadamanthys Systems - автономнный ЭС Perseus - MEA (Рис. 19).
Достоинства:
- Широкая функциональность: при наличии мощной, компактной, лёгкой и малошумной силовой установки экзоскелет становится практически универсальным.
- Ряд областей применения не предполагают использования неавтономных экзоскелетов
Недостатки:
- Повышенные габариты и масса в сравнении ЭС неавтономного типа.
- Значительное усложнение конструкции.
- Ограниченное энергопотребление.
- Отсутствие единого подхода к созданию мощных, компактных, лёгких и малошумных силовых установок.
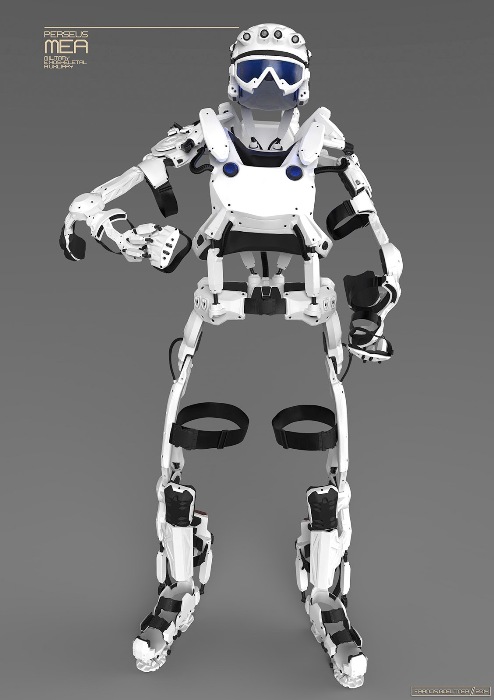
Рис. 19. Концепт автономного активного экзоскелета Perseus - MEA, Rhadamanthys Systems (США).
B. Неавтономные. Бортовой источник энергии отсутствует. Экзоскелет получает энергию извне (по силовым кабелям, по гидравлическим линиям или иным другим путём). Пример: ЭС XOS 2 (рис.12).
Достоинства:
- Упрощение конструкции.
- Выигрыш в габаритах и массе.
- Практически неограниченная суммарная мощность силовых приводов.
Недостатки:
- Существенно меньшие функциональные возможности.
На сегодняшний день автономные и неавтономные экзоскелеты в количественном отношении распределены приблизительно поровну. При этом бортовым источником энергии оснащаются только ЭС нижних или верхних конечностей или ЭС отдельных частей тела, что объясняется высоким уровнем энергопотребления экзоскелетов нижних и верхних конечностей.
5. Вид силовых приводов.
По виду силовых приводов можно выделить экзоскелеты следующих классов:
A. Экзоскелеты с электрогидравлическими приводами. В качестве исполнительных двигателей чаще всего используют гидравлические цилиндры, реже - поворотные гидродвигатели (гидроквадранты), что объясняется пониженным КПД последних за счёт перетечек рабочей жидкости через торцевые уплотнения. Электрогидравлическими приводами оснащены экзоскелеты BLEEX (рис. 13) и XOS 2 (рис. 12).
Достоинства:
- Высокие удельные (по отношению к массе и габаритам) значения развиваемых усилий и мощностей.
- Хорошие динамические показатели.
- Естественное ограничение диапазона углов в сочленениях ИМ за счёт ограничения хода выходного звена гидродвигателя.
Недостатки:
- Высокая стоимость элементной базы.
- Высокая сложность системы управления.
B. Экзоскелеты с электромеханическими приводами. Используют электродвигатели вращательного действия в сочетании с редукторами. Электромеханические приводы используются в экзоскелетах ExoAtlet (рис. 14) и HAL (рис. 15).
Достоинства:
- Высокий КПД.
- Хорошие динамические показатели.
- Достаточно простая система управления.
Недостатки:
- Необходимость использования редукторов для создания требуемых значений моментов в усиливаемых сочленениях.
- Невысокие удельные (по отношению к массе и габаритам) показатели развиваемых усилий и мощностей.
C. Экзоскелеты с электропневматическими приводами. В качестве исполнительных двигателей чаще всего применяют пневматические цилиндры, реже - поворотные двигатели. Электропневматическими приводами оснащены экзоскелета М. Вукобратовича (рис. 3-8). Интересен реабилитационный экзоскелет нижних конечностей, разработанный группой исследователей из университетов Goce Delcev (Македония) и L'Aquila (Италия) в 2011 г. (рис. 20) [9, 10].
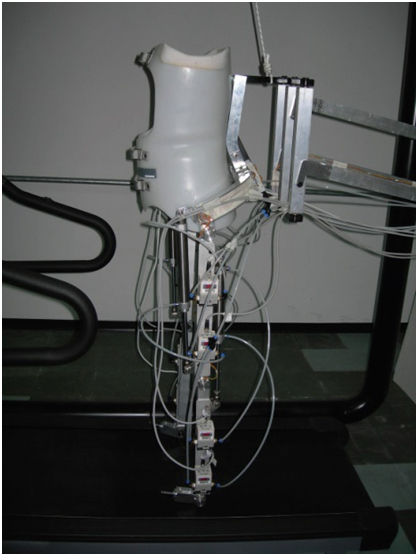
Рис. 20. Реабилитационный экзоскелет нижних конечностей, университеты Goce Delcev (Македония) и L'Aquila (Италия), 2011 г.
Достоинства:
- Более дешёвая в сравнении с электрогидравлическими приводами компонентная база.
- Высокие экологические показатели.
Недостатки:
- Повышенные требования к технике безопасности для пневмосистем с высокими рабочими давлениями.
- Плохие динамические характеристики.
- Система управления высокой сложности.
- Невысокие удельные значения развиваемых усилий и мощностей относительно массы и габаритов.
D. Экзоскелеты с искусственными мускулами на основе высокомолекулярных соединений. Одним из наиболее перспективных направлений развития исполнительных приводов для антропоморфной робототехники является использование искусственных мускулов, что позволяет обеспечить характеристики роботов (в качественном плане), близкие к характеристикам человека. В настоящее время ведутся исследовательские работы по искусственным мускулам на основе электроактивных, химически активных и фотоактивных полимеров.
Достоинства:
- Антропоморфные характеристики.
- Возможность резервирования за счёт использования множества мускулов для усиления одного сочленения.
- Минимальное энергопотребление.
- Высокие удельные показатели развиваемых усилий и мощностей (относительно массы и габаритных размеров).
- Упрощённая система управления.
- Хорошие динамические характеристики.
Недостатки:
- Высокая стоимость.
- Недостаточно исследованы.
Высокий КПД электроприводов и относительная простота системы управления приводами такого типа объясняются отсутствием промежуточного каскада усиления в цепи управления. Т.е., в отличие от электромневматических и электрогидравлических приводов, где система управления построена на использовании электрических сигналов, а исполнительная система использует энергию рабочего тела, в электромеханическом приводе система управления и исполнительная часть построена на использовании электрических сигналов. Используемые же в электромеханических приводах редукторы обладают значительно более высоким КПД в сравнении с электропневматическими или электрогидравлическими усилителями мощности.
Перспективным направлением развития пневматических исполнительных двигателей являются пневмомускулы, созданные фирмой Festo (Германия) [11]. Достоинства пневмомускулов - более линейные в сравнении с пневмоцилиндрами силовые характеристики, а также невысокие габариты. Основной недостаток - ограниченное значение линейного перемещения (не более 25% от номинальной длины).
Большие перспективы связаны с использованием искусственных мускулов на основе электроактивных, химически активных или фотоактивных полимеров. Однако в настоящее время это направление плохо развито, что делает невозможным практическое применение приводов такого вида в современном экзоскелете.
Наиболее распространённым видом силового привода для экзоскелетов является электрогидравлический привод.
6. Способ получения управляющих сигналов.
По способу получения управляющих сигналов экзоскелеты подразделяются на четыре типа:
A. Экзоскелеты с программным управлением. ЭС управляется оператором в соответствии с программно определёнными движениями или совокупностями движений. Обычно реализуют наиболее необходимые движения, такие как встать/сесть на стул, ходьба, повороты влево/вправо и т.п. К числу экзоскелетов данного класса принадлежит ExoAtlet (рис. 14).
Достоинства:
- Максимально простая система управления.
- Такой подход позволяет отработать ИМ в части эргономики и функциональности, систему управления силовыми приводами, систему стабилизации экзоскелета в пространстве и решить ряд иных важнейших научно-технических задач.
Недостатки:
- Возможность выполнения только предварительно заданной последовательности движений.
- Ограниченная функциональность.
- Практически полное отсутствие обратной связи с оператором. Единственная возможность повлиять на поведение экзоскелета связана с выбором заранее определённой совокупности движений.
B. Экзоскелеты с силовым управлением. Оператор за счёт мышечных усилий, прикладываемых к элементам ИМ, осуществляет их перемещение. Чем больше прикладываемая оператором сила, тем выше скорость движения управляемых элементов ИМ и тем выше усилия, создаваемые этими элементами. Экзоскелеты XOS2 (рис. 12) и BLEEX (рис. 13) принадлежат к данному классу.
Достоинства:
- Реализуется принцип силового очувствления.
- Оператор в любой момент времени контролирует движения экзоскелета.
Недостатки:
- Существенная метаболическая ценность выполняемых действий для человека-оператора.
- Усложнённая система управления.
C. Экзоскелеты с управлением на основе мышечной активности (электромиография). Электроды, закреплённые на поверхности тела человека, либо же инвазивно внедрённые в его тело, преобразуют биотоки, возникающие при напряжении определённых мышц, в сигналы управления экзоскелетом. Вопросы управления техническими средствами реабилитации на основе биотоков, считываемых неинвазивно установленными электродами, рассмотрены в работах [12-15]. К числу экзоскелетов данного класса относится HAL (рис. 15).
Достоинства:
- Низкая метаболическая ценность выполняемых действий для человека-оператора.
- Высокое совершенство системы управления.
Недостатки:
- Невысокие значения биопотенциалов приводят к сильной зашумлённости сигналов, на основе которых происходит управление.
- Высокая сложность системы управления за счёт сложных алгоритмов распознавания управляющих сигналов и определения однозначного соответствия управляющего сигнала и сигналов управления для конкретных исполнительных двигателей.
- Невозможность получить значения биотоков со всех мышц.
- Опасность для здоровья оператора инвазивного размещения электродов.
- Недостаточно исследованный способ получения управляющих сигналов.
D. Экзоскелеты с управлением на основе нейронной активности (электроэнцефалограмма головного мозга). В настоящее время является одним из наиболее перспективных направлений развития систем получения управляющих сигналов, однако вопрос пока не исследован в должной мере. В качестве примера экзоскелета с таким способом управления можно привести совместный проект Кореи и Германии (рис. 20), направленный на создание интерфейса головной мозг-машина и управление на его основе экзоскелетом нижних конечностей [16].

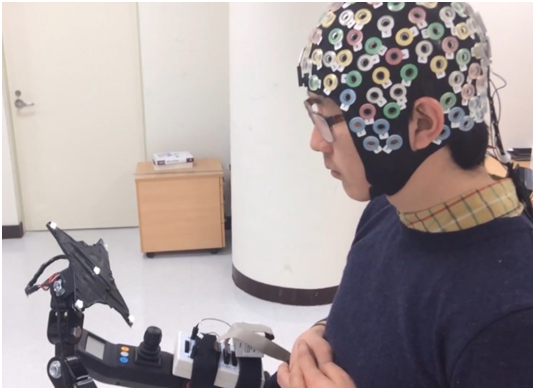
Рис. 21. Экзоскелет нижних конечностей с нейроинтерфейсом, Корея, Германия, 2015 г.
Достоинства:
- В перспективе - наиболее совершенный способ управления.
Недостатки:
- Сильно зашумлённый сигнал, невозможно поставить в однозначное соответствие управляющему сигналу конкретных движений.
- Наиболее сложная система управления.
- Недостаточно исследованный способ получения управляющих сигналов.
Актуальное состояние вопроса характеризуется невозможностью управления экзоскелетом в реальном времени.
Экзоскелеты с программным управлением представляют собой промежуточную ступень эволюции на пути к полноценному экзоскелету с обратной связью с оператором. Одним из возможных вариантов организации обратной связи является силовое очувствление. Наиболее существенный недостаток управления по силе - достаточно высокие усилия, которые вынужден развивать оператор в процессе управления, что диктует относительно высокую метаболическую ценность движений, совершаемых в экзоскелете. Этого недостатка лишён способ управления экзоскелетом на основе биотоков. Однако актуальное состояние вопроса не позволяет производить однозначную дешифровку сигналов, что делает данный способ управления неприменимым.
В настоящее время перспективы управления экзоскелетом на основе нейронной активности видятся, скорее, в предварительной юстировке системы управления, но не в непосредственном управлении ИМ в реальном времени. В лучшем случае сигналы нейронной активности могут быть использованы для коррекции управления.
7. Тип силовой установки и источника энергии.
По типу силовой установки и источника энергии можно выделить экзоскелеты следующих классов:
A. ЭС с двигателем внутреннего сгорания (ДВС) в качестве силовой установки. Силовые установки мобильных роботов на основе ДВС, выходной вал которого приводит во вращение входные валы электрогенератора и гидронасоса, рассмотрены в работах [17-21]. Примером является ЭС BLEEX (рис. 13).
Достоинства:
- Хорошие удельные показатели развиваемой мощности относительно массы и габаритов.
Недостатки:
- Невысокие значения развиваемой мощности, характерные для приемлемых габаритов и массы силовой установки.
- Высокое шумовое воздействие.
- Вибрационное воздействие.
- Выхлопные газы.
- Высокая пожароопасность.
B. Экзоскелеты с аккумуляторной батареей в качестве источника энергии. Примеры: ЭС ExoAtlet (рис. 14), HAL (рис. 15) и AWN-02 (рис. 16).
Достоинства:
- Отсутствие выхлопных газов.
- Практически бесшумная установка.
- Электродвигатели хорошо поддаются регулированию.
Недостатки:
- Невысокие значения плотности энергии, характерные для современных аккумуляторных батарей (ожидаемая плотность энергии для литий-воздушных батарей составляет порядка 3460 Вт*ч/кг).
- Высокая продолжительность процесса зарядки.
C. Экзоскелеты с топливными элементами в качестве источника энергии. Под топливными элементами подразумеваются портативные реакторы, преобразующие химическую энергию топлива в электрическую. Известно об исследованиях, ведущихся корпорацией Lockheed Martin по применению топливных элементов на экзоскелете HULC (рис. 22) [22]. За разработку топливных элементов отвечает корпорация Protonex Technology.

Рис. 22. Автономный экзоскелет нижних конечностей HULC, Lockheed Martin Corporation, США, 2009 г.
Достоинства:
- Потенциально более высокая плотность энергии в сравнении с классическими аккумуляторами.
- Возможность оперативной зарядки.
- Высокий КПД преобразования энергии.
Недостатки:
- Недостаточно исследованы.
D. Экзоскелеты с силовыми установками нетрадиционного типа. В качестве источника энергии может использоваться энергия взрыва пороховых газов. В качестве силовых установок могут быть применены двигатель Стирлинга или компактная авиационная вспомогательная силовая установка.
В настоящее время проводятся исследования, направленные на создание различных силовых установок для мобильных роботов. Так в работе [23] описана силовая установка анаэробного типа на базе поршневого двигателя, в котором энергия унитарного топлива (пероксид водорода) трансформируется в гидравлическую энергию, потребляемую роботом. Силовая установка с похожим принципом действия, работающая на топливе на основе углеводорода, описана в [24].
Достоинства:
- Наивысшие удельные показатели для силовой установки, работающей на энергии взрыва пороховых газов.
- Возможность утилизации лишней тепловой энергии, отводимой от основной силовой установки (например, от ДВС) за счёт использования двигателя Стирлинга.
Недостатки:
- Выхлопные газы.
- Большие габаритные размеры вспомогательной силовой установки.
- Повышенные требования к технике безопасности.
- Шумовое и вибрационное воздействия для силовой установки, работающей на энергии взрыва пороховых газов, и вспомогательной силовой установки.
- Необходимость дополнительного преобразования энергии для силовой установки, работающей за счёт энергии взрыва пороховых газов.
- Трудность регулирования для вспомогательной силовой установки.
Наиболее распространены силовые установки на основе ДВС и силовые установки, использующие аккумуляторные батареи в качестве источников энергии. Высокоперспективным является вариант с использованием силовой установки, работающей на энергии взрыва пороховых газов, однако недостатки данного варианта пока не устранены, что сдерживает развитие подобных силовых установок. Авиационная вспомогательная силовая установка обладает большими габаритами и массой, что ограничивает её применение экзоскелетами тяжёлого класса с высокой грузоподъёмностью.
8. Область применения.
В соответствии с областями применения экзоскелеты классифицируют следующим образом:
A. Экзоскелеты для экстремальных областей применения. Сюда относятся экзоскелеты для военного применения (как такелажные, так и экзоскелеты поля боя) и экзоскелеты для применения с целью предупреждения и ликвидации последствий чрезвычайных ситуаций.
В качестве примера экзоскелетов такого назначения можно указать XOS 2 и Hercule (рис. 23) [25]. Разработка Hercule инициирована в 2009 г. Генеральным директоратом по вооружениям (Direction générale de l'armement), Франция. В качестве разработчика выступает французская фирма RB3D, впервые представившая своё творение в 2011 г. Масса ИМ составляет 30 кг, грузоподъёмность - 40 кг. Экзоскелет имеет 14 степеней подвижности, 4 из которых усилены электроприводами. Автономность составляет порядка 4 часов, в качестве источника энергии используется Li-Ion аккумулятор. Разработчики развивают Hercule в двух направлениях: для военного и гражданского применения. Третье поколение экзоскелета планируется оснастить верхними конечностями.

Рис. 23. Прототип автономного экзоскелета для экстремальных областей применения нижних и верхних конечностей Hercule, RB3D, Франция.
Достоинства:
- Применение экзоскелетов может кардинально улучшить не только защищённость бойца на поле боя, но и весь комплекс его характеристик.
- Применение при разборе завалов экзоскелетов вместо тяжёлой техники оставляет максимальные шансы для выживания спасаемых.
- Во время тушения пожаров в высотных зданиях пожарные вынуждены носить своё снаряжение десятки лестничных пролётов. При оснащении их экзоскелетами они смогут оперативно и без лишних физических усилий добираться до места тушения пожара.
Недостатки:
- Основные недостатки экзоскелетов для экстремальных областей применения связаны с тем, что они не полностью повторяют биомеханику человека, накладывая, тем самым, существенные ограничения на его движения.
B. Экзоскелеты для гражданских областей применения. К этому классу принадлежат, главным образом, промышленные и медицинские экзоскелеты.
Достоинства:
- Применение экзоскелетов способно значительно облегчить тяжёлый физический труд работников в промышленности и строительной отрасли.
- В некоторых условиях экзоскелет может с успехом заменить тяжёлую строительную технику, грузоподъёмные машины и механизмы (например, при прокладке железнодорожных путей).
- Применение экзоскелетов в медицине позволит не только ускорить реабилитацию пациентов, но и на порядок увеличить шансы на восстановление подвижности больных с проблемами опорно-двигательного аппарата.
- Большое количество пациентов со спинальной травмой нуждаются в средствах передвижения, альтернативных инвалидным креслам.
- Вертикализация положения крайне благотворно влияет на состояние организма пациента.
Недостатки:
- Не достаточно исследованы вопросы рентабельности применения экзоскелетов в различных отраслях промышленности и строительной сфере.
- Необходимость внедрения принципиально новых норм техники безопасности.

Рис. 24. Автономный экзоскелет X1 отрасли космических технологий, разработки NASA, США, 2012г, [26].
Наиболее оправданно применение экзоскелетов в экстремальных областях деятельности человека, где экономические вопросы отходят на второй план в сравнении с вопросами повышения эффективности. Но в этих областях наиболее критична проблема ограничения движений оператора, на которую разработчики пока не могут дать адекватного ответа. Применение же экзоскелетов в гражданской сфере сдерживается, главным образом, не актуальным уровнем техники и технологии, а экономическими аспектами, не исследованными пока в должной мере.
Более подробно о сферах применения экзоскелетов разобрано во второй части статьи.
<< Практическое применение экзоскелетов в промышленности и строительстве | Строительство оборонительных сооружений в период ВОВ >>
| На главную | Архив: раздел специалиста строителя |