Устойчивость кранов в условиях ветрового воздействия
Мишин А.В., Хряков К.С., Сорокин П.А. Московский государственный университет путей сообщения
Кроме основных нагрузок, учитываемых при проектировании грузоподъемных кранов, башенные краны необходимо рассчитывать на воздействие ветровой нагрузки.
Ветровая нагрузка представляет собой стохастический процесс, амплитуды и фазы колебаний которого, представляют собой недетерминированные величины. Металлоконструкции кранов обладают значительным запасом прочности, а воздействие порывов (флуктуаций от математического ожидания случайного процесса) необходимо учитывать при проектировании системы безопасности башенных кранов для сохранения устойчивости их положения вследствие чувствительности башенных кранов к ветровой нагрузке.
Результатом предлагаемого способа является повышение безопасности эксплуатации башенных кранов путем сохранения их устойчивости в условиях действия пульсирующей ветровой нагрузки за счет системы нейросетевого прогнозирования.
Сущность способа заключается в обеспечении устойчивости башенных кранов от опрокидывания при пульсирующем воздействии ветровой нагрузки на основе нейросетевой системы управления путем прогнозирования будущего значения скорости ветра, сравнения его с предельно допустимым значением и выдачи команды управления на исполнительные органы для корректировки положения стрелы с целью уменьшения давления на металлоконструкцию крана, обусловленного пульсациями ветровой нагрузки, до того как опрокидывающий момент от ветровой нагрузки достигнет критического значения. В приводе поворота применена активная система управления, целью которой является обеспечение принудительного поворота стрелы в зависимости от показаний датчиков.
На рисунке дана структурная схема устройства, реализующая предлагаемый способ.
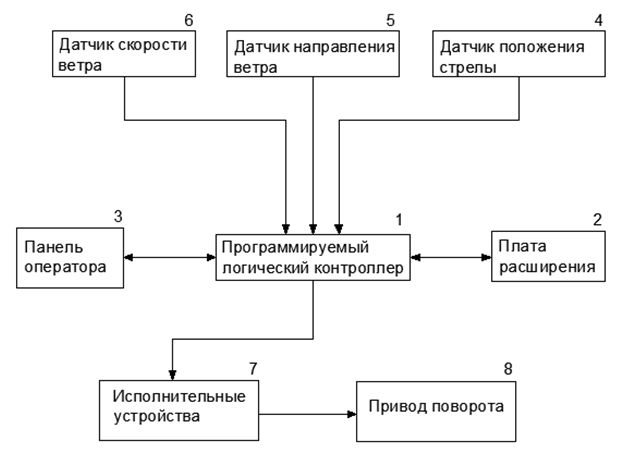
Программируемый логический контроллер (1), формирующий команды управления, установлен в шкафу управления на кране; плата расширения (2), интегрированная в программируемый логический контроллер, необходима для обработки данных на основе методов искусственного интеллекта; панель оператора (3), установленная в кабине управления, служит для настройки и диагностики системы, мониторинга, индикации и архивации контролируемых параметров; датчик положения (4) стрелы установлен в механизме поворота; датчики направления (5) ветра и скорости (6) ветра расположены на наивысшей отметке башенного крана; исполнительные устройства (7) - катушки реле и контакторов, системы звуковой и световой сигнализации - смонтированы в шкафу управления; привод поворота (8) с векторным управлением с обратной связью по скорости установлен на механизме поворота.
Для достижения требуемого качества прогнозирования нейронную сеть необходимо обучить в стационарных условиях на основе значений максимальных скоростей ветра в районе установки крана, используя базу данных метеостанции, далее подключить плату расширения, содержащую предварительно обученный нейросетевой алгоритм, к программируемому логическому контроллеру.
Принцип работы активной системы в рабочем состоянии крана, реализуемой заявленным способом, заключается в следующем: с начала эксплуатации крана происходит регистрация показаний скорости и направления ветра и предварительно обученная нейронная сеть на основе имеющейся базы данных максимальных скоростей ветра продолжает обучаться на регистрируемых значениях, прогнозирует будущее значение скорости и направления ветра.
В штатном режиме при скорости ветра меньше критической для рабочего состояния на панели оператора (3) выводится сообщение о нормальном режиме работы. При прогнозировании опасного порыва и его направления, т.е. обладающего значительной энергией и превышающего допустимую скорость, и на основе сравнения сигналов с датчиков положения стрелы и направления ветра вычисляется угол рассогласования, далее происходит регистрация события об аварийной ситуации на карту памяти контроллера с резервной копией на карту памяти панели оператора (3), далее выводится индикация на панели оператора (3), включается сирена и программируемый логический контроллер формирует сигнал для приведения в действие противоугонных захватов (для передвижных башенных кранов) и сигнал управления, поступающий на исполнительные устройства привода поворота (8), для корректировки положения стрелы по наименьшей траектории (для уменьшения угла рассогласования) согласно прогнозируемому направлению порыва ветра на основе датчиков положения (4) стрелы, направления (5) ветра и скорости (6) ветра. При этом поворот стрелы производится до того как опрокидывающий момент от ветровой нагрузки достигнет предельного значения.
В нерабочем состоянии крана система нейросетевого прогнозирования продолжает функционировать за счет питания от дополнительного источника. При этом кран переводится в нерабочее состояние согласно руководству по эксплуатации на данный тип крана. При работе системы прогнозирования в нерабочем состоянии продолжается пополнение базы данных скоростей ветра, что повышает точность прогноза в рабочем состоянии.
Предлагаемый способ позволит повысить безопасность эксплуатации башенных и стреловых кранов путем сохранения их устойчивости при пульсирующем ветровом воздействии.
<< Проектирование виброприводов для перегрузочной техники | Применение лёгких стальных конструкций в строительстве >>
| На главную | Архив: информация, материалы |